2019-04-19 16:06:14
WB50车间活动改装倒车摄像头控制单元
倒车摄像头系统简介
选装倒车摄像系统(仅与PCM以及前后的停车辅助系统结合使用)更便于准确地进行倒车驻车和倒车挪车,且更便于挂接拖车。倒车摄像头可目视检测车辆后面的区域。
镜头的打开角度,检测区域:
水平打开角度131°,垂直打开角度100°。
该系统可确定单独打开和关闭的条件,然后打开摄像头。挂上倒挡时或者如果该系统检测到车辆正在向后滑动,将启用显示输出。也可以通过PCM手动启用。一旦在驾驶员退出倒挡后车速超过15km/h,或者如果接合变速箱挡区P或接合停车制动器,将会关闭该系统。
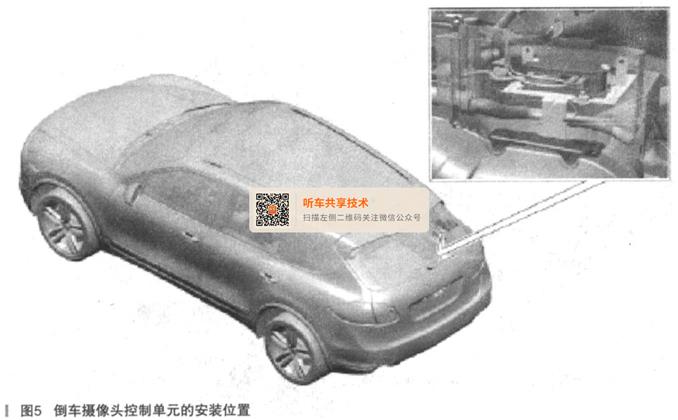
倒车摄像头集成在后盖的把手按钮中,且可将视频图像传输至位于行李箱右下饰板下方的摄像控制单元。
在摄像头控制单元中会均衡图像且会并入引导线。然后会将图像传输到PCM。只有在电动停车制动器未接合的情况下才会显示图像。如果检测到拖车或后盖打开,则会显示视频图像,但不会并入引导线。
如果需要,可在倒车摄像头图像中显示动态引导线。它们会对应于前轮位置进行更改。引导线通过当前方向盘位置说明了行驶路线,从而向驾驶员显示按照该引导线的当前设置通过方向盘操纵行驶的路线。
此外,屏幕上的矩形彩色区域(从距离车辆40cm处开始,并延伸至约5m)表示车辆长度。在屏幕上显示倒车摄像头图像时会抑制电视声音。音频源声音将会断续输出。显示图像时,语音控制将不可用。另外,停车辅助系统的顶视图显示内容可能会在来自倒车摄像头的图像输出上重叠。在这种情况下,可通过触摸屏幕上的车辆再次显示和隐藏停车辅助系统显示内容。根据转向角,会在屏幕的左右边缘显示停车辅助系统。
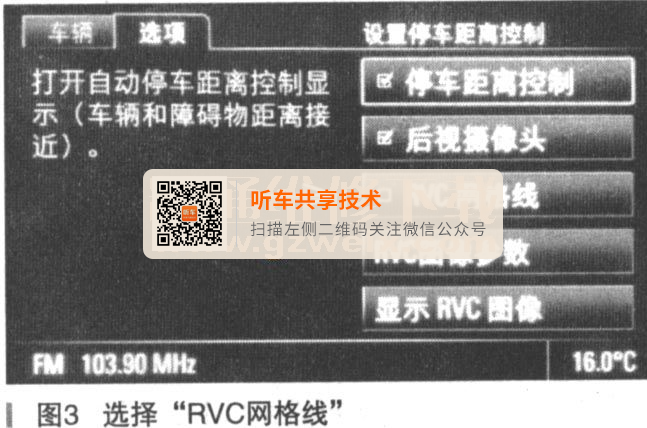
以下为倒车摄像功能在PCM(保时捷通信信息娱乐系统)中的设置,设置步骤如图1~图4所示。
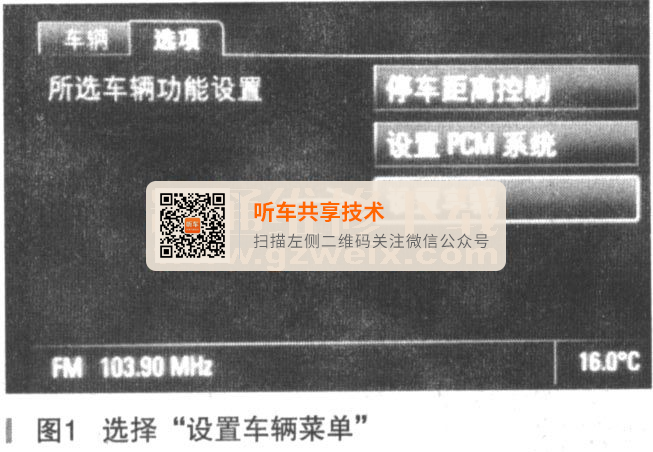
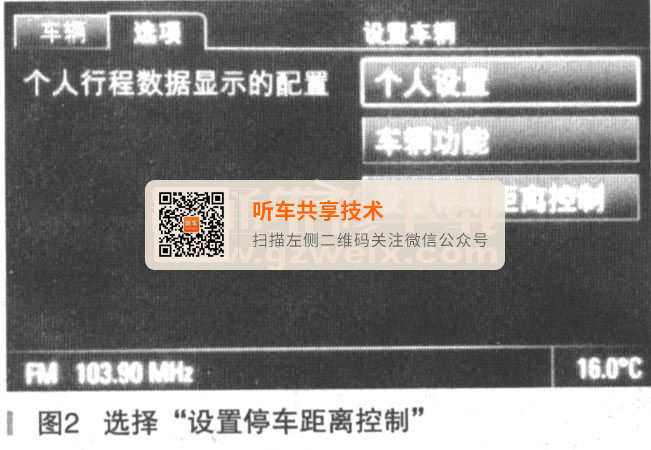

注:如在PCM选项中无显示“‘设置停车距离控制”菜单,需重新进行PCM自动编码功能或进行手动编码,设置为:带超声波传感器和倒车摄像配置功能。
改装倒车摄像系统说明
年款:起始时间2011年,截止时间2012年。
车型:Cayenne/Cayenne Diesel/Cayenne S Hybrid Cayenne S/CayenneTurbo。
关注事项:
倒车摄像头控制单元。
装备:
包括前部和后部停车辅助系统的倒车摄像头(低)(识别号7X7)。
包括前部和后部停车辅助系统的倒车摄像头(识别号7X8)。
倒车摄像头(识别号7X9)。
情况:
由于个别供应商遭遇全球范围的生产瓶颈,受影响的车辆在交付时并未配备倒车摄像头控制单元。
因此,这些车辆上的倒车摄像头可能不工作,也可能仅执行有限的功能。
所需操作:
·改装倒车摄像头控制单元
·在车辆系统中设定倒车摄像头控制单元
·对倒车摄像头控制单元进行编码
·读取故障记忆,然后将其清除
·校准倒车摄像头
倒车摄像头控制单元安装位置如图5所示。
受影响的车辆:
仅限为此活动分配的车辆(另见PIWIS车辆信息)。
零件号:
000.043.303.28→倒车摄像头控制单元1个。
N.104.066.04→圆头螺钉,M5X8用于固定侄阵拐膺以腔制单元3个。
N.989.520.01 →紧固螺钉(用于安全带支座)1个。
工具:
·PIWIS检测仪II 9818
·间距激光器 VAS 6350/2 WE 1369
·校准单元VAS 6350 WE 1368
·开口套筒梅花阪手Nr.98-1 Pos.1
·专用套头Nr.170
·组合装配楔Nr.199
·扭矩扳手Nr.90 Pos.2
·扭矩扳手Nr.90 Pos.3
·蓄电池充电器(额定电流至少为40 A)
·偏口钳
·螺丝刀(小)
·六角头套筒扳手套头,a/f3 mm
·螺钉工具,Torx 25
·螺钉工具,Torx 30
步骤:
对于Cayenne S Hybrid,下面指定的任务只能由至少具备受过电气操作培训的人员(eip)资格的员工执行。这些任务不得由不具备相应资格的员工执行。
操作必须在高压技师((HVT)的指导和监督下完成。
车辆高压电气系统不得断开。
请遵照车辆高压电气系统操作的一般警告说明→2X00IN高压电气系统操作的一般警告说明。
1.关闭点火开关并取下点火钥匙。
2二拆下后行李箱右侧侧饰板→700319拆卸和安装后行李箱侧饰板“拆卸”部分。
3.必要时松开音箱放大器并将其放到旁边→914419拆卸和安装音箱放大器“拆卸”部分。
4.准备预先布置好的电线(如图6所示),以便安装倒车摄像头控制单元。
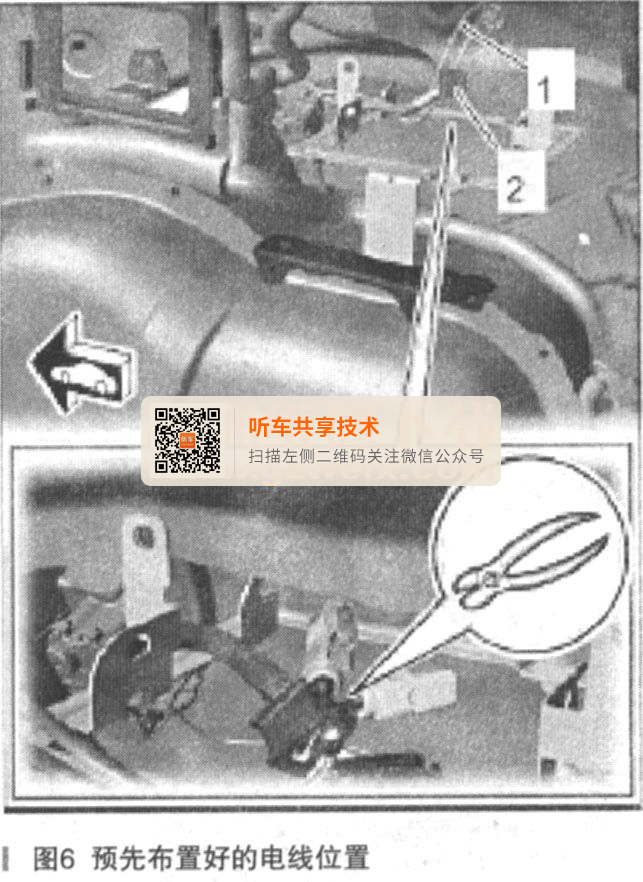
①将倒车摄像头控制单元的电线-Pos. 1-连同电缆支架-Pos. 2-一起从车身折边上拉下。
②用偏口钳切断电缆支架-Pos.2-上的扎带。切断电缆支架上的扎带时,确保不要损坏电线。
5.拆下倒车摄像头控制单元的支架(如图7所示)。
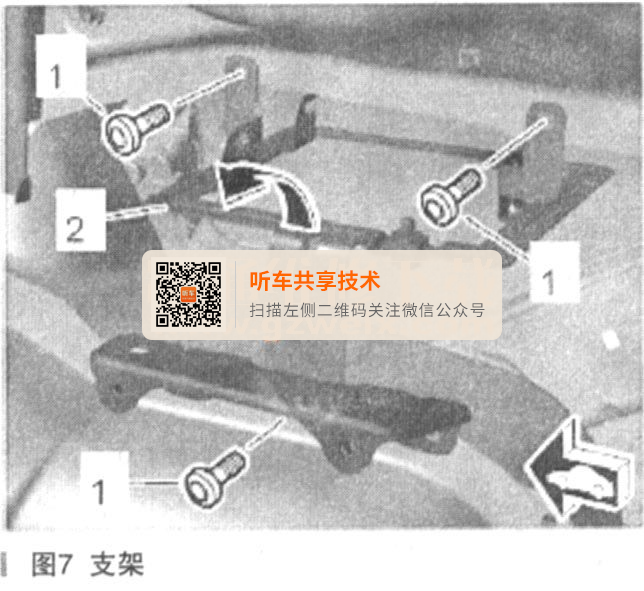
①变型1(未配备拖车钩或电视调谐器的车辆):
拧下紧固螺钉-Pos. 1-,然后拆下支架-Pos. 2-(-Pfeil-)。
②变型2(配备拖车钩的车辆):
拆下拖车钩控制单元→“669619拆卸和安装拖车钩控制单元-“拆卸”部分。
③变型3(配备电视调谐器的车辆)。
拆下电视调谐器支架→911719拆卸和安装电视调谐器-“拆卸”部分。
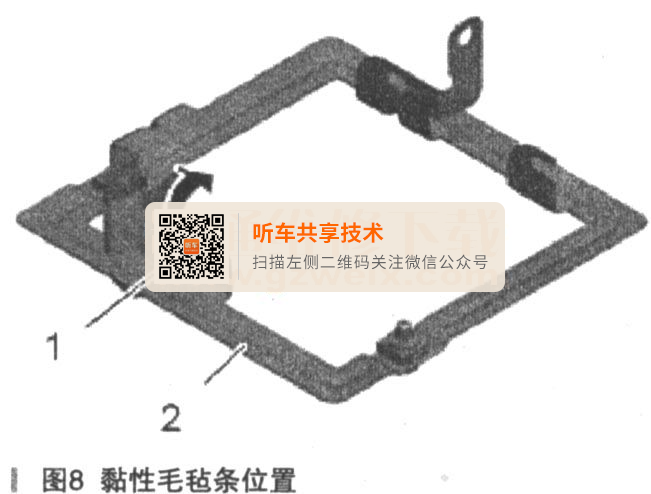
6.将黏性毛毡条-Pos. 1-(如已粘贴)从支架-Pos. 2-的侧面撕下(-Pfeil-),并将其弃置(如图8所示)。
7.将倒车摄像头控制单元安装到支架中(如图9所示)。
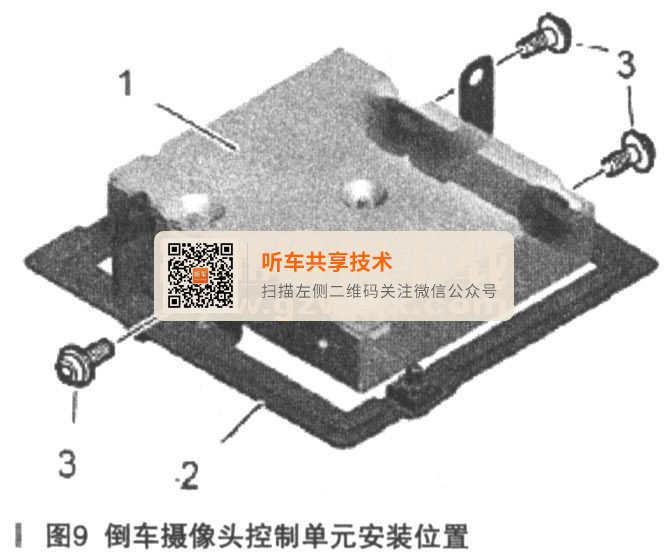
①变型1(未配备拖车钩或电视调谐器的车辆)。
a.将倒车摄像头控制单元-Pos.1-安装到支架-Pos. 2-中。
b.对齐倒车摄像头控制单元-Pos. 1-,然后用紧固螺钉-Pos. 3-将其固定。
→紧固扭矩:4.5 N·m (3.5 fdb.)
②变型2(配备拖车钩的车辆),如图10所示。
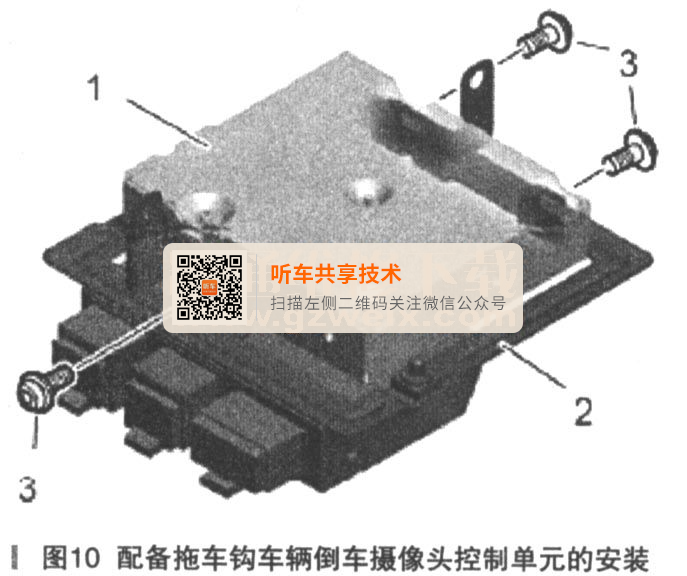
a.将倒车摄像头控制单元-Pos.1-安装到支架-Pos. 2-中。
b.对齐倒车摄像头控制单元-Pos. 1-,然后用紧固螺钉-Pos. 3-将其固定。
→紧固扭矩:4.5 N·m (3.5 ftlb.)
③变型3(配备电视调谐器的车辆),如图11所示。
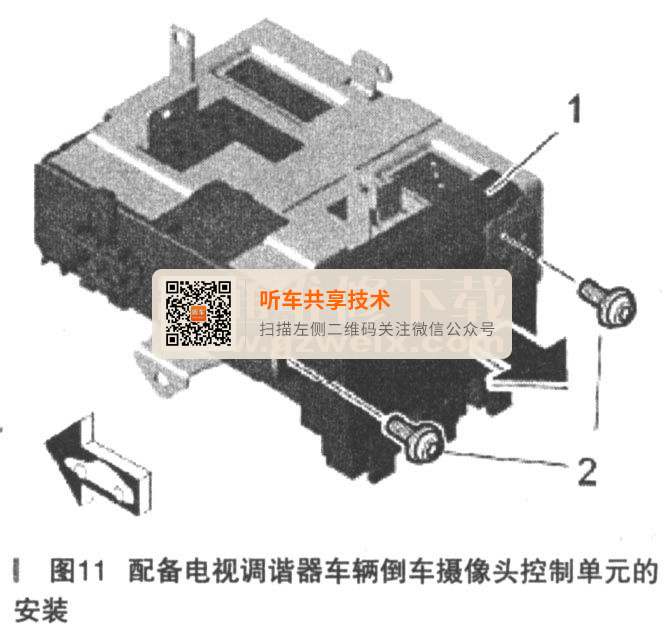
a.松开紧固螺钉-Pos. 2-(位于拖车钩控制单元-Pos. 1-上,仅当已安装该单元时),然后将控制单元从电视调谐器支架上拆下。
b.将倒车摄像头控制单元-Pos.1-安装到电视调谐器支架-Pos. 2-中(如图12所示)。
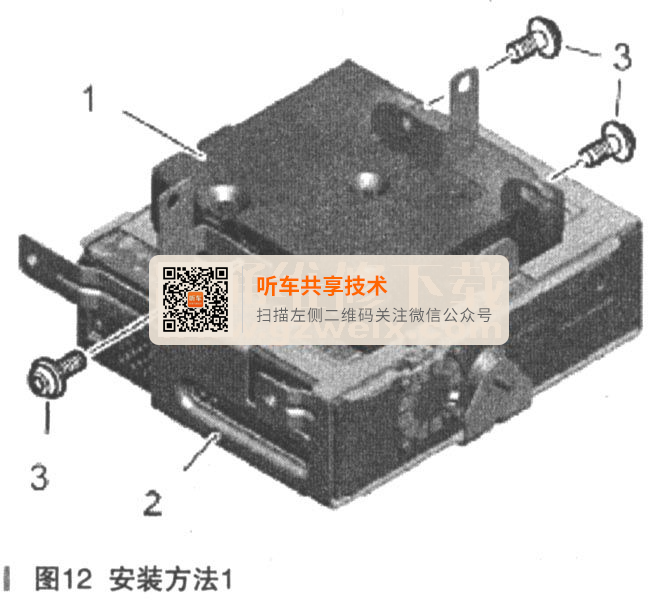
c.对齐倒车摄像头控制单元-Pos. 1-,然后用紧固螺钉-Pos. 3-将其固定。
。紧固扭矩:4.5 Nm (3.5 ftlb.)
d.将拖车钩控制单元-Pos. 1-放到电视调谐器支架上(如图13所示)
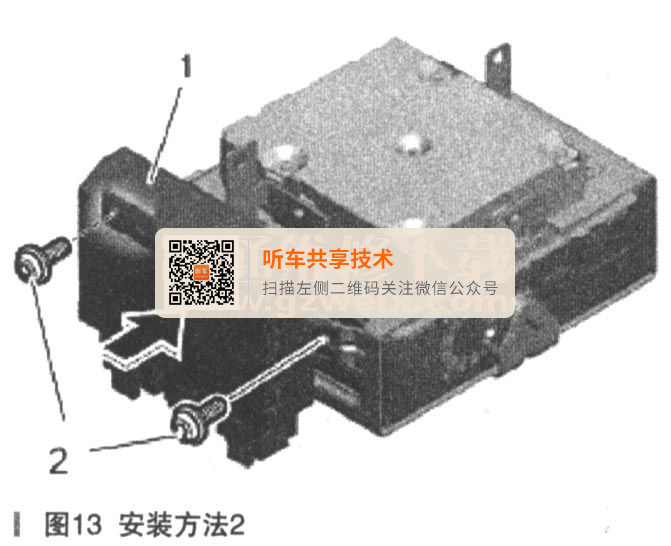
e.固定拖车钩控制单元-Pos. 1-(用紧固螺钉-Pos. 2-固定)。
→紧固扭矩:4.5 Nm (3.5 fdb.)
8.安装倒车摄像头控制单元的支架(如图14所示)。

①变型1(未配备拖车钩或电视调谐器的车辆)。
a.将支架-Pos. 1-(倒车摄像头控制单元-Pos. 2-的支架)放到车身上。
b.对齐倒车摄像头控制单元-Pos. 2-,然后用紧固螺钉-Pos. 3-将其固定。
→紧固扭矩:9N·m (6.5 fdb.)
②变型2(配备拖车钩的车辆)。安装拖车钩控制单元→669619拆卸和安装拖车钩控制单元-“安装”部分。
③变型3(·配备电视调谐器的车辆)。
安装电视调谐器支架→911719拆卸和安装电视调谐器“安装”部分。
9.将电线连接到倒车摄像头控制单元(如图15所示)。

①插入电气插头-Pos. 1-(位于倒车摄像头控制单元-Pos. 2-上)(-Pfeile A-),并将其锁止-Pfeil B-。
②用扎带-Pos. 3-将天线线路固定到线束上。
10.必要时安装音箱放大器→914419拆卸和安装音箱放大器“安装”部分。
11.安装后行李箱右侧侧饰板→700319拆卸和安装后行李厢侧饰板“安装”部分。
12.在车辆系统中对倒车摄像头控制单元进行设定和编码。
注意:
欠电压将导致编码中止。
诊断期间电流增大可能导致电压下降,由此可能产生一个或多个故障条目,并使编码过程异常终止。
一开始作业之前,请将额定电流至少为40 A的适当蓄电池充电器连接到发动机舱中的跨接启动端子。
注意:
如果WLAN连接不稳定,则编码将会中止。
WLAN连接不稳定可能会中断PIWIS检测仪II与车辆通信模块(VCI)之间的通信。因此,编码可能会中止。
”控制单元编码期间,请务必通过USB电缆将PIWIS检测仪II与车辆通信模块(VCI)相连。
信息:
此处介绍的步骤基于PIWIS检测仪II检测软件版本9.900。
PIWIS检测仪操作说明具有更高的优先级,如出现不一致的情况,必须以这些操作说明为准。
例如,可能会与版本较高的软件产生不一致的情况。
①准备工作。
a.将额定电流至少为40 A的蓄电池充电器连接到发动机舱中的跨接启动端子。
b.使用原装车钥匙打开点火开关。对于配备“保时捷免钥匙进入系统”的车辆,必要时使用点火锁中的控制面板代替原装车钥匙执行此操作。
c.PIWIS检测仪II 9818必须通过USB电缆连接到车辆通信模块(VCI)。然后将通信模块与车辆相连,并打开PIWIS检测仪。
d.在PIWIS检测仪的开始界面上调用?“Diagnostics”诊断)菜单,然后选择车型。
然后,诊断应用程序启动,并显示控制单元选择屏幕。
②在车辆系统中设定倒车摄像头控制单元。
a,在控制单元概图屏幕(?“Overview”(概图)菜单)中按F7调用?“Additional menu”(附加菜单如图16所示)。
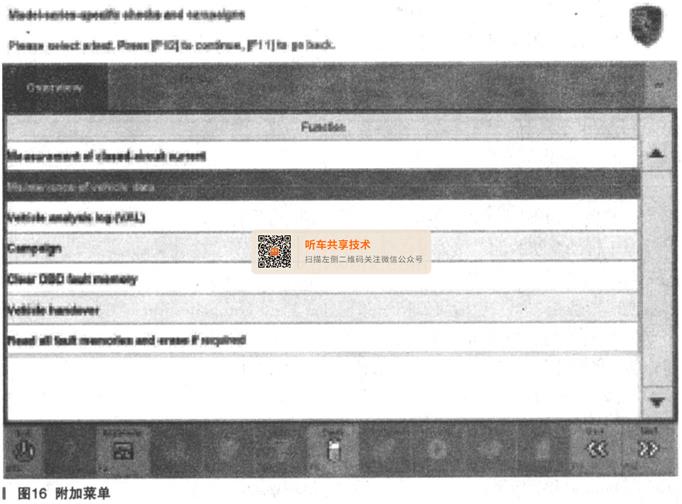
b.选择?“Maintenance ofvehicle data”(车辆数据维护),然后按“>>”确认选择升车辆数据维护。
c.按“>>”跳过包含车辆说明、颜色/材料和X编号的相关信息的屏幕。
d.在M编号屏幕中,根据相应的车辆装备在?“Parking aid”(停车辅助)中选择“7X8”或“7X9”(请参见PIWIS车辆信息)→选择装备(如图17所示)。
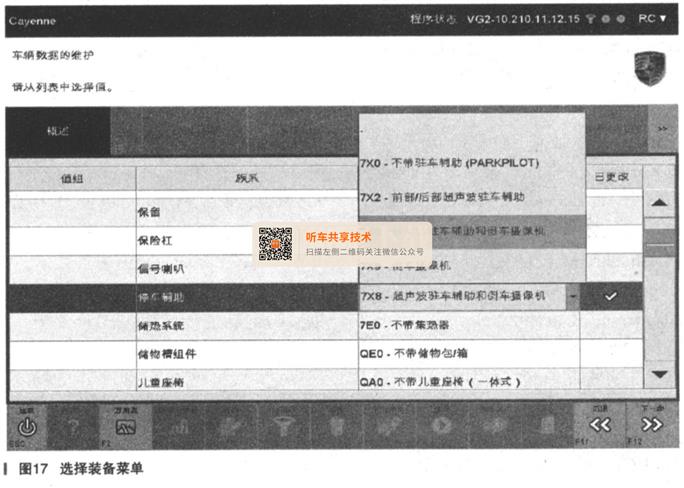
信息:
对于采用识别号7X7“包括前部和后部停车辅助系统的倒车摄像头(低)”的车辆,改装贫准」车摄像头控制单元后,必须选择识别号7X8“包括前部和后部停车辅助系统的倒车摄像头(低)”而非先前存储的识别号634。
e.按F8保存更改,然后按“>>”继续。
f按F8再次保存值,然后按“>>”完成对车辆订单的更改。
g.选择?“Overview”(概图)菜单,并按“<<”返回至控制单元概图屏幕。
③对倒车摄像头控制单元进行编码。
a.在控制单元选择屏幕(?“Overview”(概图)菜单)中选择?“Reversing camera”(倒车摄像头)控制单元,然后按“>>”确认选择。
b.找到倒车摄像头控制单元且其显示在列表中后,选择?“Codings/adaptations”(编码/自适应)菜单→选择控制单元。
选择控制单元
c.选择?? “Restore factorysettings/codes (or New part coding) ”(恢复出厂设置/代码(或新部件编码)),然后按>>开始编码→恢复出厂设置/代码(如图18所示)。
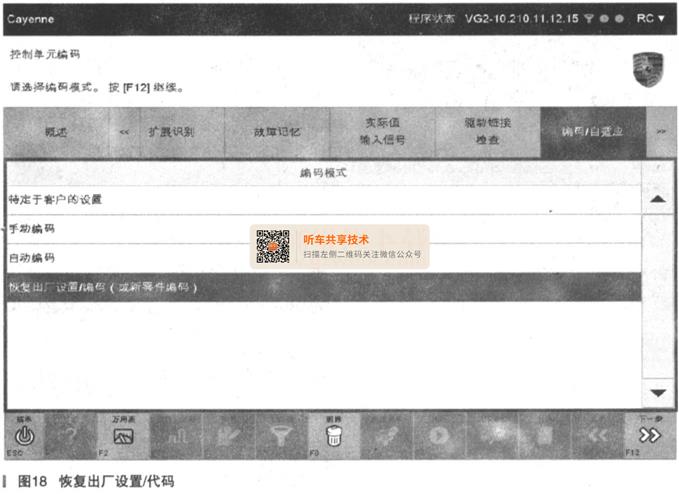
d.完成编码后,将会显示“Codinghas been completed successfully”(编码已成功完成)消息,并且“Status”(状态)框中将显示勾号。
如果编码未成功完成(出现错误消息“Coding was not completedsuccessfully”(编码未成功完成)),则必须重新进行编码。
e.编码成功完成后,按“>>”,然后返回至控制单元选择屏幕。
④对PCM进行编码。
a.在控制单元选择屏幕(?“Overview”(概图)菜单)中选择?“PCM/CDR”控制单元,然后按“>>”确认选择→选择PCM/CDR。
b.找到PCM控制单元且其显示在列表中后,选择?”Codings/adaptations”(编码/自适应)菜单。
c.择?“Automatic coding”(自动编码)功能,然后按“>>”开始编码→自动编码。
d.完成编码后,将会显示“Codinghas been completed successfully”(编码已成功完成)消息,并且“Status”(状态)框中将显示勾号。
如果编码未成功完成(出现错误消息“Coding was not completedsuccessfully”(编码未成功完成)),则必须重新进行编码。
e.编码成功完成后,按>>继续。
⑤读取并清除故障记忆。
a.在控制单元选择屏幕(?“Overview”(概图)菜单)中,按F7调用“Additional menu”(附加菜单)。
b.选择?“Read all faultmemories and erase if required”(读取所有故障记忆并在需要时清除)功能,然后按>>确认什清除故障记忆。
检测仪将读取控制单元的故障记忆。
清除故障记忆
c.读取故障记忆后,按F8清除故障记忆条目。
d.系统询问您是否确实要清除所有故障记忆条目时,按F12 ( “Yes”(是)。
存储在各控制单元故障记忆中的故障条目将会删除。
信息:
如果发现控制单元中存在无法清除的故障,并且这些故障与改装倒车摄像头控制单元无关,则必须查找并排除这些故障。
e.清除故障记忆后,选择?“Overview”概图)菜单,然后按“<<”返回至控制单元选择屏幕→控制单元选择。
13.校准倒车摄像头→9143K2校准倒车摄像头。
14.关闭点火开关。
15.从车辆上断开PIWIS检测仪。
16.对于配有保时捷免钥匙进入系统的车辆,再次用控制面板替代点火锁中的原装车钥匙。
17.关闭并断开蓄电池充电器。
18.使用PCM打开倒车摄像头显示屏,然后检查倒车摄像头是否正确工作?PCM操作说明“倒车摄像头”。
校准倒车摄像头
在以下情况下必须重新校准倒车摄像头。
·拆装或更换倒车摄像头时
·拆装或更换倒车摄像头控制单元时
·降低底盘时
·在对后盖、后盖锁上部或后盖释放装置进行改装或修理工作过程中
·校准倒车摄像头可以平衡轮胎、底盘公差和摄像头的安装公差
·校准时需要用到校准单元VAS 6350 WE 1368和间距激光VAS6350/2 WE 1369
·在校准过程中,倒车摄像头控制单元会计算摄像头图像特定于车辆的调整值(例如图像矫正)
·在大约需要2 min的实际校准过程后,可以在车辆显示屏上看到矫正后的图像(如图19所示)。

只能在水平地面上执行校准。
在配有空气悬架的车辆上,打开点火开关,关闭车门并将空气悬架设置为“Comfort”(舒适)。
1.将车辆停放在水平面上,并根据VAS 6350的操作说明在车辆后面设置校准单元VAS 6350WE 1368。
设置概图如图20所示。
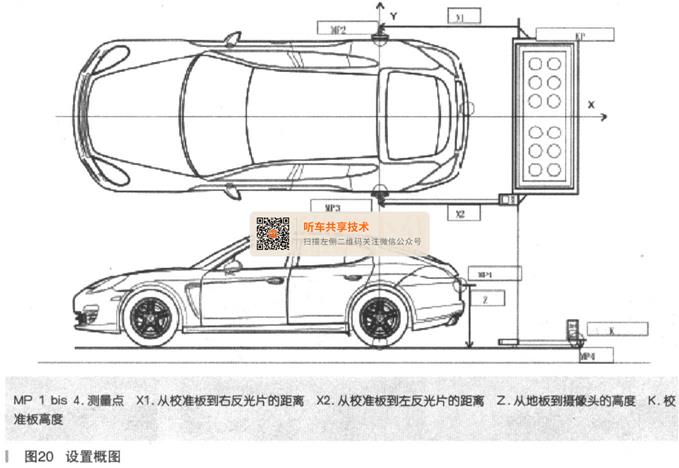
2.根据VAS 6350的操作说明在车辆上安装车轮螺母支架和反光片。反光片必须自由悬挂。
3.将工作表面与车辆中间对齐,根据VAS 6350的操作说明调整激光水平仪以适合校准板。
(1)以下工具是必需的:
①校准单元。
②间距激光。
注意:
电压降低
·可能对控制单元造成不可修复的损坏
·可能对控制单元造成损坏
·控制单元中的故障条目
·已中止在控制单元中编码
·控制单元发生故障(甚至在编程过程中)
→在断开控制单元之前,请关闭点火装置并取下点火车匙。
→确保编程过程中电源不会中断。
→将额定电流至少为→标称值:40 A的蓄电池充电器连接到车辆蓄电池上。
(2)将保时捷系统检测仪连接至车辆并启动系统检测仪。打开点火开关,然后按F12继续。
(3)选择车型并启动。
(4)在“overview”(概图)中选择“Reversing camera”(倒车摄像头)控制单元。

(5)选择“Calibrate reversingCamera”(倒车摄像头校准)。
(6)请遵守检测仪上的警告。
请将反光片安装到后轮上。反光片必须自由垂直,不能有任何物体阻量值-Z-。请注意检测仪上的规范。(对于校准目的,必须选择水平地面。测量摄像头离地面的高度(Mp 1, Z值)为此,完全展开测量测头并将其靠着摄像头的中心放置。稍稍地来回旋转测量设备并接受最短的测量值)。如图22所示。

8.对齐激光水平仪(如图23所示。
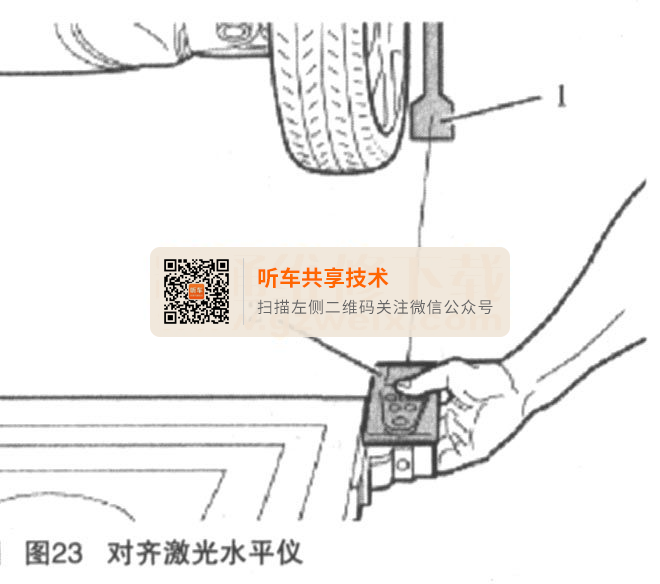
①校准板的表面必须干净且在表面上不得有任何物体。将校准基板放置车辆后面,然后借助线性激光将该板的中心与车辆的中心对齐(如图24所示)。板表面必须清洁,并且没有任何物体。

②将测距单元放置在左右两侧的校准板的止动托架处,然后测量与反光片的距离-X1-和-X2-(如图25所示)。
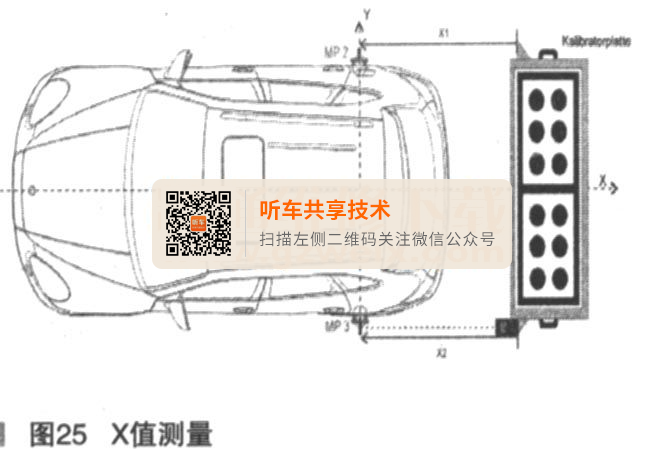
a.距离应大约为1,400 mm。
b.左右两侧之间相差必须为<1mm.
③输入距离-X1-和-X2- 。
a.如果-X1-和-X2-之间相差超过1 mm,则这些值将被拒绝。
9.输入高度-K-(校准板高度)。
10.开始校准过程(如图26所示)。不得移动车辆。
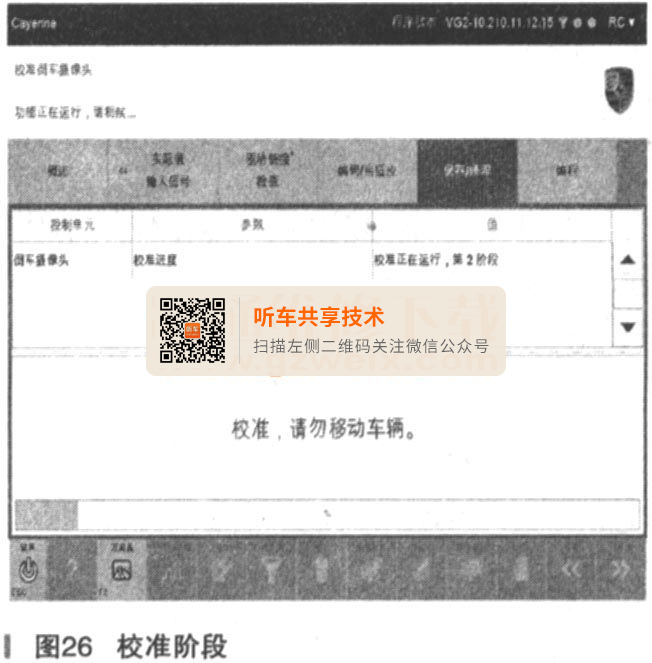
11.检测仪确认“calibration isComplete”(校准完成)。
12.检查倒车摄像头的功能和图像质量。
13.读取故障记忆。
来源:网络


