2019-10-24 13:17:43
奔驰S级大灯基本功能介绍(下)
1.代用/应急灯促动
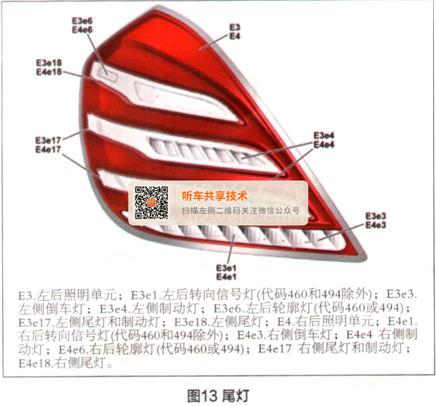
在车辆外车灯的各系统部件出现故障时,代用灯促动/应急灯(图13)促动功能可以确保实现最低亮度的车外照明,该功能包含两个方面:(1)后SAM控制单元持续监控车尾照明的功能,当左后转向灯(E3e1)或右后转向灯(E4e 1)发生故障时,它就以闪光灯频率促动左侧或右侧制动灯(E3e4或E4e4),即促动代用灯功能,相应的故障信息显示在仪表盘上,为此,后SAM控制单元通过CAN B、 N73和CAN HMI将相应的请求发送至仪表盘。(2)如果CAN B或CAN PER发生故障,E1n9、 E2n9和后SAM控制单元就会启用软件应急灯,这样,后SAM控制单元促动尾灯和制动灯,大灯控制单元启用停车灯和近光灯。此外,如果雨量/光线传感器发生通信故障或光线传感器发生故障,前SAM控制单元就会视为“夜间”而启用自动开/闭行车灯。
2.倒车灯促动
倒车灯确保车辆在倒车时可以对后部车道进行照明,其促动的功能顺序:当挡位挂入R挡时,倒车灯功能启用;R挡由变速器控制单元(Y3/8n4)接合;Y 3/8n4通过CAN C1、N127、FIexRay、 N73和CAN B将“R挡已接合”信号发送至至前SAM控制单元;前SAM控制单元向后SAM控制单元发送“开启倒车灯”请求;后SAM接收此信号并促动左侧倒车灯(E3e3)和右侧倒车灯(E4e3)。
3.停车灯玛主车灯促动
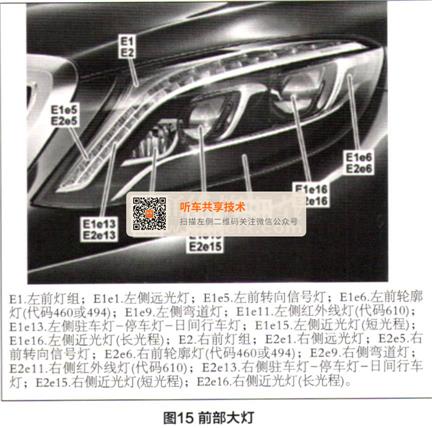
停车灯玛主车灯用于在能见度差时指示停驻车辆的位置,将车外照明灯开关(S1,图14)转至停车灯或驻车灯位置,前SAM控制单元直接读取开关状态,并通过车内CAN B发送“停车灯或驻车灯开启”请求至后SAM控制单元(N 10/8)以及通过点火开关和CAN PER发送至左大灯控制单元(E1n9)和右大灯控制单元(E2n9),从而激活相应的停车灯/驻车灯,前部大灯如图15所示。

4.环境照明功能
环境照明用于在黑暗环境条件下安全地离开并查找车辆,此时,除了停车灯/驻车灯促动,还启用大灯延迟关闭(SWA)和定位照明功能。在驾驶员熄火后(由二挡变为一挡),大灯延迟关闭功能启用,启用时间60s。其信号路径为:雨量/光线传感器通过局域互联网(LINB16)将环境亮度信息(昏暗程度)发送至前SAM控制单元,当前SAM识别到黑暗时,前SAM控制单元促动停车灯/驻车灯。此外,前SAM还会将开启环境照明的请求发送至左前车门控制单元(N69/1)、右前车门控制单元(N69/2)、左后车门控制单元(N69/3)、右后车门控制单元(N69/4)、左侧大灯控制单元、右侧大灯控制单元。这样,左前车门控制单元促动左侧外部后视镜环境照明灯和左前车门外拉手照明,右前车门控制单元促动右侧外部后视镜环境照明灯和右前车门外拉手照明,左后车门控制单元促动左后车门外拉手照明,右后车门控制单元促动右后车门外拉手照明,左侧和右侧大灯控制单元分别促动左前和右前环境照明灯。在解锁车辆时,环境照明开启并维持开启状态40s(自动重锁时间)。此外,环境照明功能需要在COMAND控制单元中进行设置,为此,COMAND控制单元通过用户接口CAN、 N73和CAN B,将“环境照明”启用信号发送至前SAM控制单元。
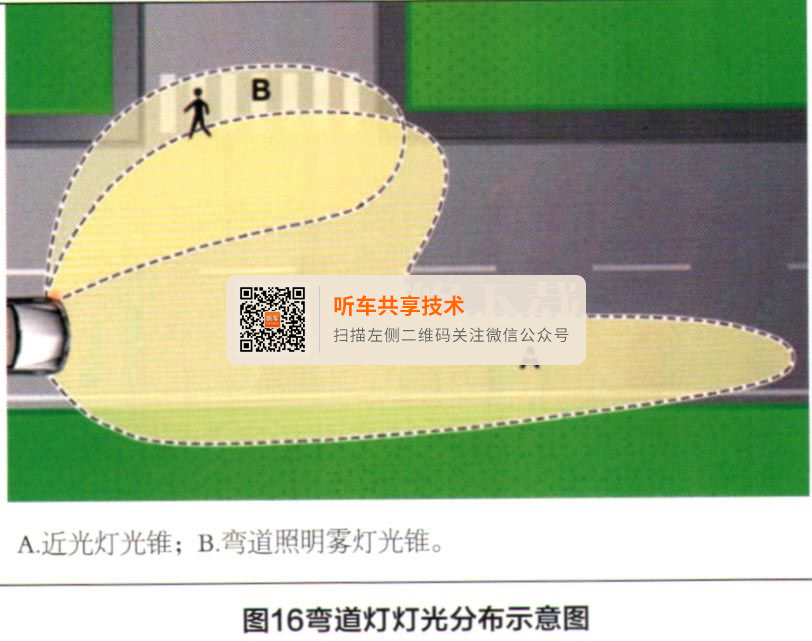
5.弯道灯功能
弯道灯改善了弯道内侧的道路边缘照明(图16),它的促动取决于方向盘转向角传感器(N49)和组合开关(S4)位置确定的转向信号,因为这些因素说明了驾驶员的方向要求。转向柱控制单元(N80)直接读取N49和S4的信号,然后通过底盘FIexRay、N73和CAN PER将相关信息发送至左侧大灯控制单元。弯道灯功能受车速影响,为此,ESP控制单元(N30/4)根据轮速传感器的信号计算车速,并将轮速和车速信号发送至左侧和右侧大灯控制单元,两侧大灯控制单元评估所有信,并在必要时促动左侧弯道灯(E 1 e9)。或右侧弯道灯(E2e9)。大灯控制单元以主从组合方式进行运作,此处左侧大灯控制单元用作主控制单元,可通过CAN PER同步右侧大灯控制单元。弯道灯仅促动一个,在车辆前进时促动弯道内侧的弯道灯,倒车时促动弯道外侧的弯道灯。如果方向盘转角或转向信号请求快速变换,两个弯道照明都会短时间亮起,相应的弯道灯以防眩形式开启和关闭。当车速在40km/h以下时,转向信号的请求与方向盘转角探测请求相比,具有较高的优先级,这样可以确保转动方向盘时(通过交通环岛的情况下)弯道内侧的道路边缘得到照明。
6.主动式转向照明灯
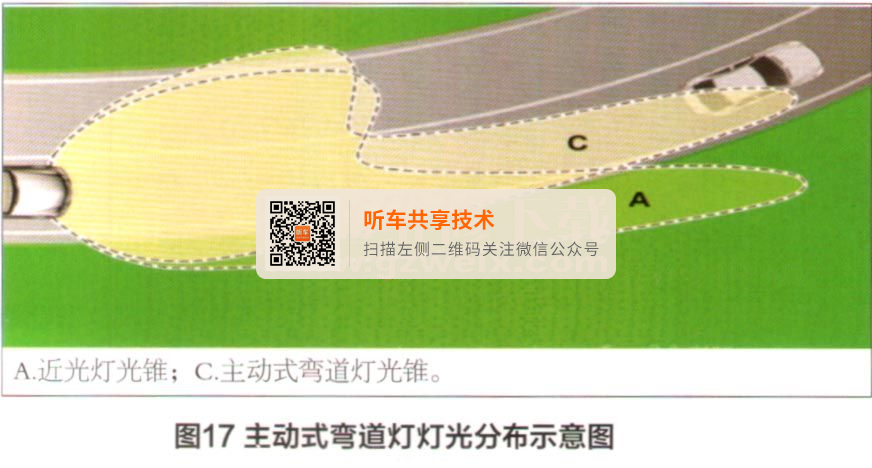
该功能可在转弯时改善道路照明(主动式弯道灯灯光分布如图17所示)。为此,近光灯(长光程)的光锥可以水平和垂直转动,在转入弯道时,弯道内侧的近光灯(长光程)最大可转动a=15°,弯道外侧的近光灯(长光程)最大可转动a=7.5°,而近光灯(短光程)的位置保持不变。主动式弯道灯功能根据转向角、车速、车辆横摆特性(车辆移动)3个设定的变量来执行,直接输入因素为转向角,车速会影响该功能的控制响应(转向角转换为摆动角)。在车速较低时,需要较慢的转换过程,这样灯光模式不会发生突变(如在城市交通中);以中等车速行驶时,对于相对较小的转向角变化立即做出响应;以较高车速行驶时,响应会大幅衰减,以较低灵敏度和更高减振的范围(约±6°转向角)来弥补车辆笔直行驶时产生的自然偏摆。整个过程的信号传递路径为:N80直接读取转向角传感器的信号,然后通过底盘FIexRay、 N73和CANPER将转向角相关信息发送至左侧大灯控制单元。车速由ESP控制单元通过车轮转速计算得出,为此,ESP控制单元通过底盘FIexRay、 N73和CAN PER将车速信号发送至左侧大灯控制单元。车辆的横摆特性由横向和纵向加速度速度传感器(B24/15)检测,然后通过CANH、ESP控制单元、底盘厂IexRay、N73和CAN PER将相应信息发送至左侧大灯控制单元。左侧大灯控制单元评估所有相关信息,并通过CAN PER与右侧大灯控制单元同步,在必要情况下,促动左侧或右侧主动式弯道灯促动马达(E1 m2或E2m2)。主动式弯道灯促动马达的当前位置分别由左侧和右侧主动式弯道灯位置传感器(E1b1和E2b1)探测,传感器的信号由相应的大灯控制单元进行评估。

来源:网络



