2019-10-24 13:19:13
剖析宝马车系灯光系统技术
一、左右前大灯
1.概述
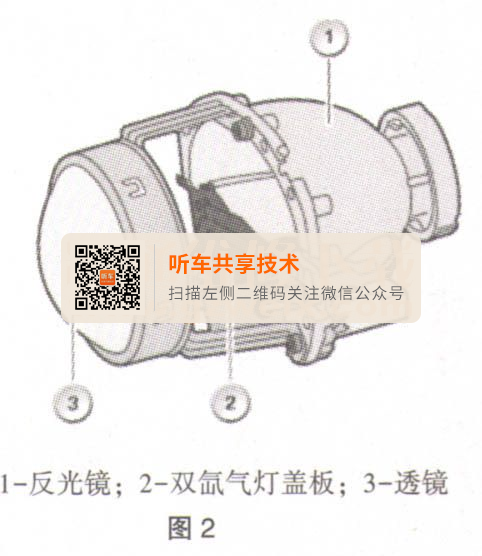
左右前大灯如图1所示,带有自动大灯光线水平调整功能的双氛气大灯属于标配范围。带有70mm透镜的椭圆体反光镜使车灯具备以下车灯功能:近光灯、远光灯、回家照明、自适应转向灯(特殊装备)。

结合自适应转向灯可实现以下附加车灯功能:不同的光分布(根据各国规格):市区光分布、公路光分布、高速公路光分布、雾天光分布;自适应大灯光线水平调整;转弯照明灯(通过单独的反光镜),转弯照明灯已绑定到自适应转向灯上。在带转弯照明灯的大灯中,安装一个带灯泡H3的固定式附加反光镜代替远光灯。
借助光导环使车灯具备以下车灯功能:停车警示灯、停车灯、欢迎灯、白天行车灯。
通过发光二极管(LED)使车灯具备以下车灯功能:转向信号灯、示宽灯(根据各国规格)、饰灯。
2.功能描述
脚部空间模块(FRM)控制外部照明和随动控制大灯。也就是说:所有照明功能都已集成到脚部空间模块中。根据所选的车灯功能,由脚部空间模块直接控制相应的组件,或是按照脚部空间块的请求通过大灯驱动模块进行控制。脚部空问模块在LIN总线上向大灯驱动模块发出请求。
(1)能够通过大灯实现下列灯光控制功能。
①停车警示灯。连接总线端K1. 30时,必须向上或向下操纵转向柱开关(转向信号灯开关)0.5s以上。
脚部空间模块(FRM)接通所选车侧的大灯内的停车灯。
②停车灯/白天行车灯/饰灯。停车灯和白天行车灯只通过两个光导环产生。这些光导环由脚部空间模块(FRM)按脉冲宽度调制控制。在接通近光灯或停车灯时,白天行车灯被复位到停车灯亮度。一个中央光源通过一个分成2部分的反光镜照射两个光导环。通过一个反光镜将内部光导环照亮。通过另一部分反光镜将光线通过2个光导管导入外部光导环中。脚部空间模块(FRM)通过脉冲宽度调制控制中央光源。因此为白天行车灯产生的光强度比停车灯的更高。通过这种调节方式,使用单独的灯泡即可实现车灯功能(停车灯/白天行车灯)。饰灯(发光二极管)由大灯驱动器模块控制。通过一个光导管将灯光分布到为此规定的区域。
③近光灯/远光灯。双氙气大灯的灯泡即用于近光灯,也用于远光灯,如图2所示。当接通近光灯时,出现一个机械盖板(即:双氙气大灯盖)垂直于灯泡前。这样双氙气灯就变成近光灯。当接通远光灯时,灯泡前的双氙气大灯盖被向前翻起(从行驶方向看)。这样双氙气灯就被打开变为远光灯。光束能够不折射地向前照射,且可利用反光镜和透镜的整个表面。
④转向信号灯。大灯驱动模块按照脚部空间模块(FRM)的请求接通转向信号灯。每个转向信号灯都配有8个发光二极管。在4条通道上分配这些发光二极管,每条通道有两个。2个发光二极管是串联的。4个通道是并联的。大灯驱动模块根据减弱的耗电量来识别发光二极管失灵。大灯驱动模块通过LIN总线向脚部空间模块(FRM)发送一个信号。脚部空间模块发出一个检查控制信息。
⑤回家照明。当车辆停止后,如果在车灯关闭的情况下操作了变光功能,则近光灯亮起。通过iDrive可以将回家照明的最大接通时间延长到240s。
⑥欢迎灯。在车辆解除联锁时控制欢迎灯(车灯开关位于“自动车灯控制”或“近光灯”位置)。脚部空间模块(FRM)接通停车灯约20s,并通过大灯驱动模块接通示宽灯。接通时间过后,脚部空间模块(FRM)将欢迎灯的亮度调低。
⑦示宽灯(与国家规格有关)。示宽灯(发光二极管)由大灯驱动模块控制。
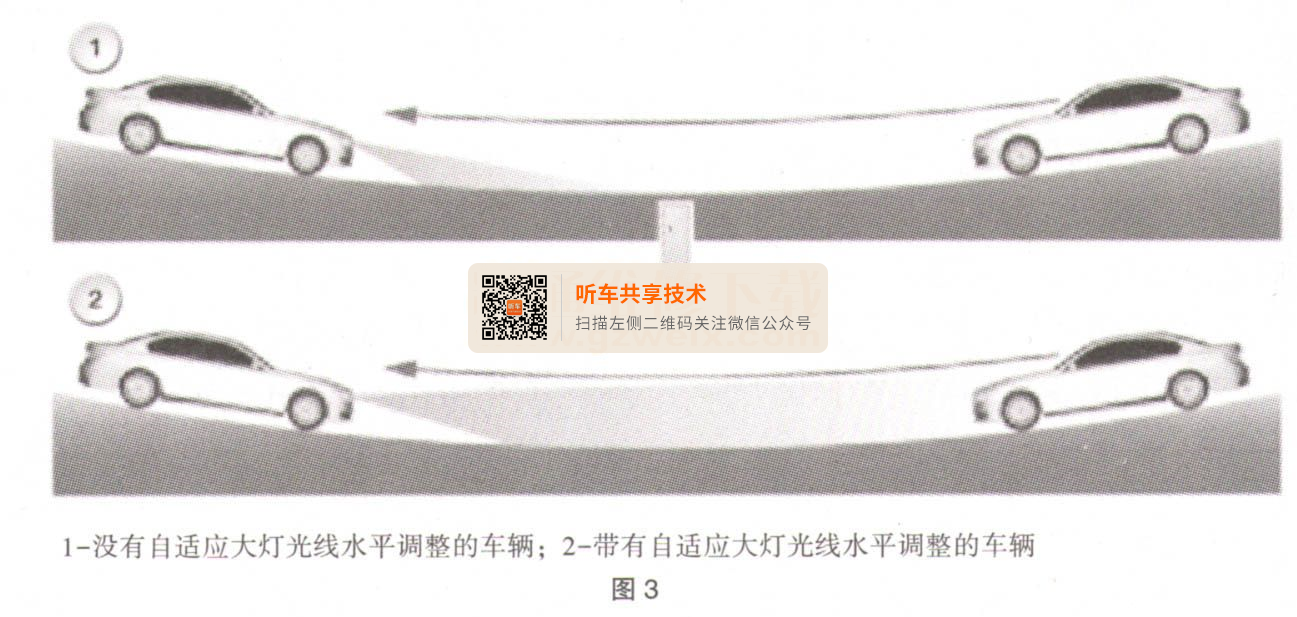
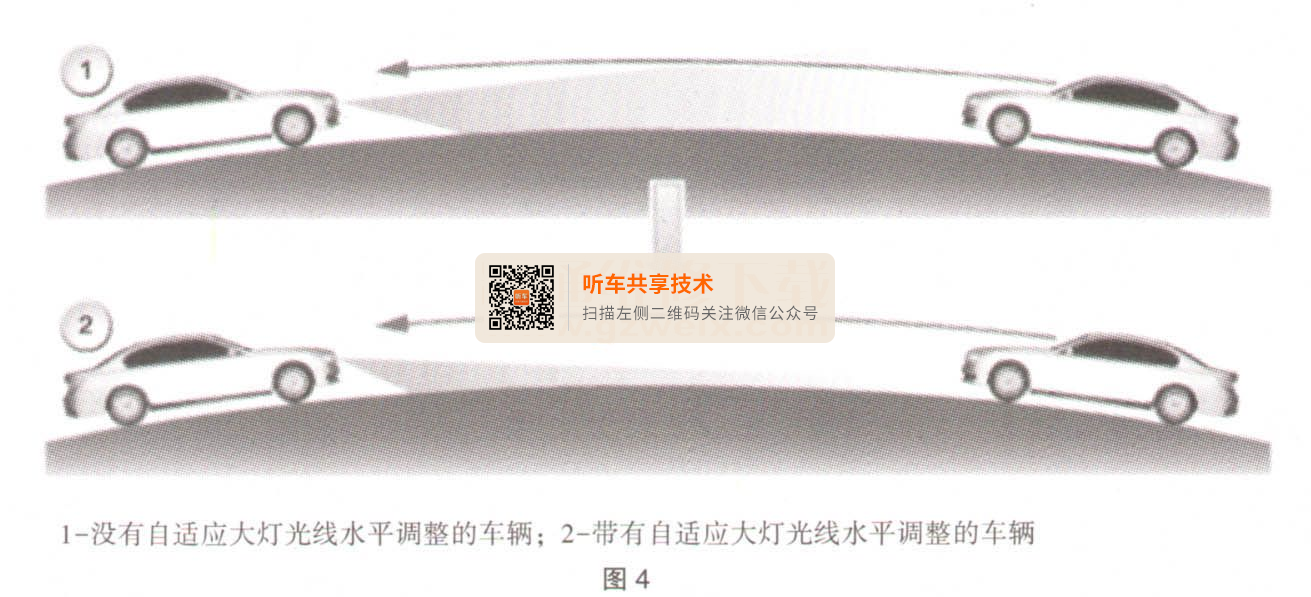
⑧自适应大灯光线水平调整。自适应大灯光线水平调整用于在行驶过程中降低或截短光线。根据脚部空间模块(FRM)的请求,大灯驱动模块通过步进电机控制转动模块以及大灯的光线宽度。行驶时,通过降低光线来提高大灯的光线宽度。为此要将转动模块最小程度地向上移动。继续对车道进行照明。对比如图3所示。行驶过坡顶时,很容易降低大灯的光线宽度。为此将转动模块最小程度地向下移动。也可避免会车时灯光晃到对面车辆。对比如图4所示。
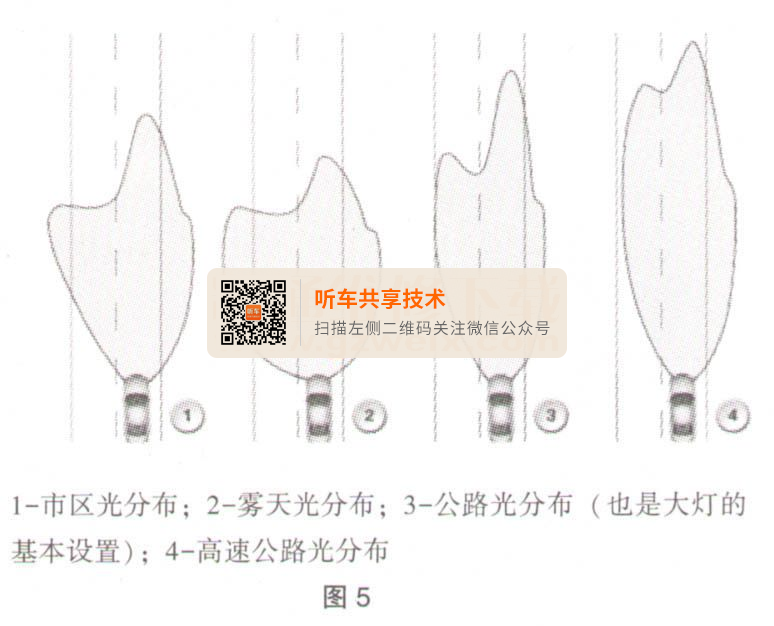
⑨不同的光分布(根据各国规格)。不同的光分布使车辆前的车道照明得到了扩展。根据脚部空间模块(FRM)的请求,大灯驱动模块通过步进电机控制转动模块并进行光分步。各个光分布间的转换无级进行。结合特殊装备“自适应转向灯”可实现以下附加车灯功能,如图5所示。
车辆启动。在开关位置“A”(自动车灯控制的开关位置中的车灯开关)和端子15开位置,两个大灯进行基准运行。也就是说:两个摆动模块按照最小速度向下运动,然后进入标准位置(车辆位于墙壁前方时可以看见,光束向下移动并最终重新返回向上)。驶入的额定位置取决于车辆的负载状态。当发动机启动后,大灯驱动模块首先控制市区光分布。
市区光分布。市区光分布实现了低速行驶时左侧车道的照明。其中,左侧大灯约向左转动约12°,向下转动约0.7°。市区光分布在发动机启动后达到约50km/h的行驶速度时激活。
公路光分布。公路光分布符合已知的近光灯。行驶速度超出约50km/h后,市区光分布转换为公路光分布。行驶速度低于约50km/h时,脚部空间模块(FRM)将光分布重新转回市区型。公路光分布显示大灯的基本设置。总系统出现故障时,基本设置接受光分布。
高速公路光分布。高速公路光分布扩大了行车灯的作用范围。其中,左侧大灯约向左转动约3.5°,向下转动约0.25°。右侧大灯向上转动约0.2°。如果以110km/h以上的速度行驶长于30s或速度超出140km/h,则脚部空问模块关闭高速公路光分布。如果速度降到110km/h以下,根据行驶速度重新设定大灯。期间步进式复位(110km/h-100km/h-90km/h-80km/h)。速度达到80km/h以上后,启动公路光分布。
雾天的光分布。雾天光分布随着前雾灯的打开而激活。雾天光分布可与市区光分布和公路光分布结合使用。其中,左侧大灯向左转动约8°,向下转动约0.7°。如果为了使用雾天光分布而激活远光灯,则大灯摆回基本位置,即公路光分布。
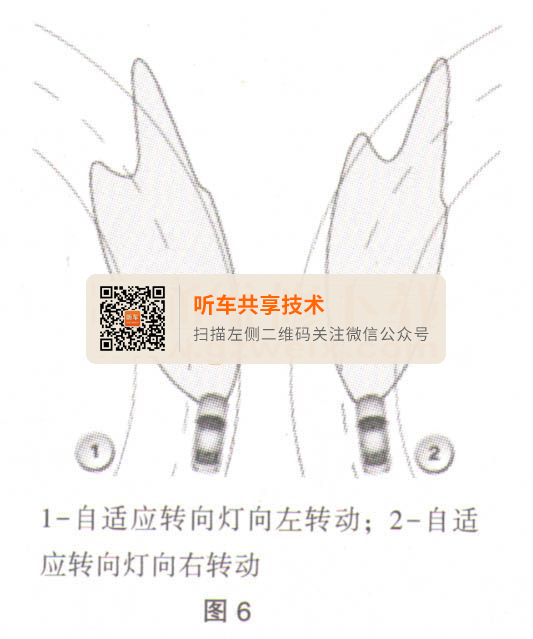
⑩自适应转向大灯。脚部空间模块(FRM)是自适应转向灯的控制单元。自适应转向大灯在转向时把双氙气灯转动到弯道内侧区域内。大灯的转动范围:向内,即向车辆中部:最多不超过10°;向外:最多不超过15°。例如右转:右侧大灯转动至15°(右侧大灯在右转时是“弯道内侧”的大灯)。从车辆向外观察,右侧大灯“向外”转动。左侧大灯转动至10°(左侧大灯摆向车辆中部,从车辆向外观察“向内”转动)。弯道外侧大灯(左侧大灯)必须和弯道内侧大灯(右侧大灯)同时到达极限位置,这样才能均匀轻柔地照过街道。脚部空间模块通过LIN总线向大灯驱动模块发送转动模块的额定值(转动模块的位置和速度)。根据脚部空间模块的输入信号,大灯驱动模块控制步进电机来调整大灯中的转动模块,如图6所示。
脚部空间模块在有系统故障时发出一条检查控制信息。另外,脚部空间模块以如下方式切换系统:如果步进电机还正常,则大灯回到直线行驶位置,大灯不再做转向摆动;如果一个大灯无法再进入直线行驶位置,则降低该大灯(通过自动大灯光线水平调整的步进电机),也可避免会车时造成对方驾驶员炫目。
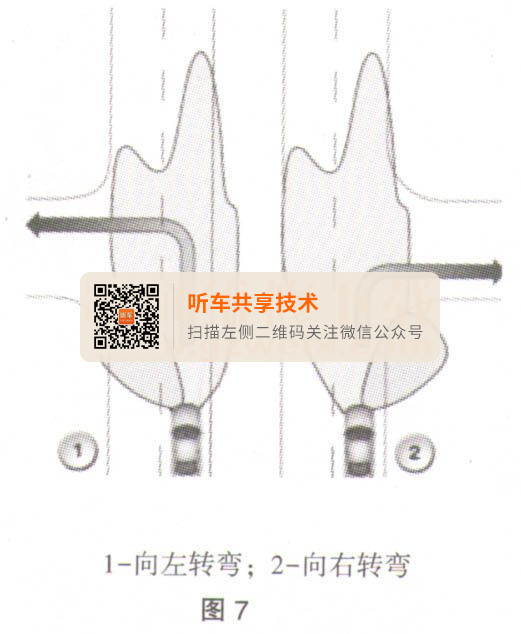
⑧转弯照明灯(特殊装备)。在带转弯照明灯的大灯中安装了一个固定式辅助反光镜和一个灯泡。通过配光镜的特殊造型,可防止会车时造成眩目。转弯照明灯由脚部空间模块(FRM)控制。转弯照明灯不会突然接通和关闭。根据暂时设定的特殊参数,转弯照明灯可以进行连读调节。在转弯时或在狭窄的弯道(迂回式道路)上时,对车道旁的区域进行辅助照明。视国家而定,在转向时接通和关闭转弯照明灯。如图7所示。
当行驶速度超过70km/h时,转弯照明灯不再受脚部空间模块控制。
在倒车时,脚部空间模块在速度不高于40km/h时接通转弯照明灯:美国规格:两侧;其他国家:已操纵转向信号灯激活的转向信号灯一侧,方向盘回转(未操纵转向信号灯:只在弯道外侧)。
在已接通转向信号灯时:静止时转弯照明灯在约4s后自动关闭,例如在红绿灯前等待通过时。然而在反光镜达到规定温度之前,可通过行驶方向远光灯开关重新接通转弯照明灯(最多3次)。脚部空间模块(FRM)内的温度模式保护大灯不受过高的热负荷。达到一个临界温度时,转弯照明灯被断开。在一个冷却阶段过后可以重新接通转弯照明灯。
(2)大灯中的以下部件参与车灯功能:
①双氙气大灯控制单元。双氙气大灯控制单元为氙气大灯的灯泡提供电源和点火电压。氙气灯控制单元没有自检功能。氙气控制单元由脚部空间模块(FRM)供电和监控。
②双氙气灯盖板。机械盖板(双氙气大灯盖)作用如下:如果接通近光灯,双氙气大灯盖垂直立于灯泡前。如果切换至远光灯或大灯变光功能,则脚部空间模块(FRM)控制一块起重电磁铁。这块起重电磁铁将双氙气大灯盖吸至水平位置。当起重电磁铁不再受控时,一根回动弹簧将双氙气大灯盖重新移回其初始位置(垂直位置)。光束因此变成近光。
③大灯驱动器模块。大灯驱动器模块安装在大灯内。受脚部空间模块的请求,大灯驱动器模块控制一些车灯功能(转向信号灯、示宽灯、饰灯的灯光)和摆动模块的步进电机。通过LIN总线进行通信,并传输脚部空间模块诸如目标位置(水平和垂直)和转动速度一类的必要信息。大灯驱动模块受脚部空间模块监控。
④摆动模块。在摆动模块内装有双氙气大灯的反光镜。摆动模块可通过两个步进电机进行水平和垂直调整(水平:为自适应转向灯向左和向右;垂直:为自动大灯光线水平调整向上和向下)。步进电机受大灯驱动模块控制。脚部空间模块通过LIN总线上的消息进行控制。
⑤零位传感器。零位传感器是一种霍尔传感器,用于收集大灯的水平转动行为。零位传感器安装在摆动模块上。零位传感器按如下方式探测随动控制大灯摆动模块的零位:当摆动模块通过零位传感器时,零位传感器发出一个电平变化信号(在高和低之间)。
零位传感器对摆动模块的运行起决定作用:当车辆停车时,大灯被转入熄火位置(在总线端KI.15断开时);车辆启动前总是进行一次大灯的基准运行。在基准运行时,大灯从关断位置经零位传感器进入直线行驶位置;如果零位传感器失灵,则按如下方式通过一个机械参考点确定大灯位置—摆动模块先移动到允许的机械极限位置,然后移动到直线行驶位置,然后断开自适应转向灯,通过在组合仪表上显示检查控制信息来表示系统故障。
3.结构及内部连接
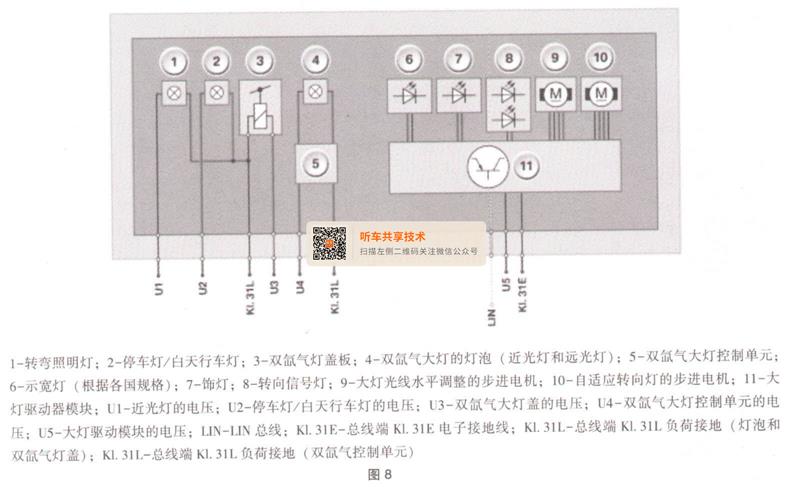
每个大灯都是通过12针插塞连接与脚部空间模块(FRM)相连,如图8所示。
4.标准值
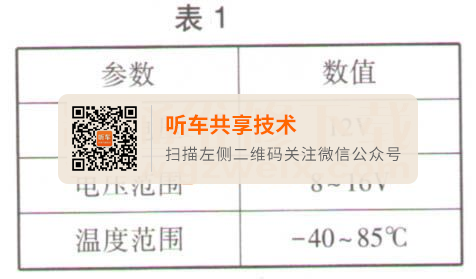
左右大灯的额定值见表1。
5.诊断提示
左右大灯失灵时出现以下现象:脚部空间模块(FRM)内出现故障代码存储记录。
检查控制信息。脚部空间模块(FRM)自总线端K1.15接通起监控外部照明的所有灯泡。冷热监控基于各个灯泡输出端的电流测量。
车灯关闭时的冷监控。为了进行冷监控,通过一个短电流脉冲接通灯泡,而不使灯泡亮起(灯丝的热惰性)。不对发光二极管(LED)和双氙气灯进行冷监控(LED反应过快并一且将亮起;原则上不可用电压脉冲控制双氙气灯)。
在总线端K1.15接通后的头6s内会猛烈提高电流脉冲的数量。通过这项驾驶前检查(Pre - Drive –Check),可以在开始行车前显示灯泡的状态(检查控制)。在驾驶前检查后重新降低电流脉冲的数量。每隔90s通过一个短电流脉冲控制灯泡。
车灯接通时的热监控。热监控基于各个灯泡输出端的电流测量。在约2s内可识别损坏的灯泡。
来源:网络




